")
En los últimos meses, muchos clientes industriales me han planteado la misma pregunta:
“¿Es mejor un AGV/AMR construido a partir de una máquina manual o un robot diseñado desde cero como vehículo autónomo?”
Es una gran pregunta, y curiosamente, un tema del que se habla muy poco en el sector de la robótica móvil.
Esta comparación solo aplica a dos tipos de robots móviles: tractores (tuggers) y carretillas elevadoras AGV/AMR.
Los robots tipo mouse o plataformas suelen diseñarse directamente como vehículos autónomos, no como conversiones.
Como ocurre en la mayoría de decisiones de automatización, la respuesta correcta es:
Depende del contexto.
Vamos a responder a cuestiones como:
¿Cuál es la diferencia entre un AGV convertido desde máquina manual y un AMR diseñado desde cero?
¿Cuándo es necesario usar modo manual en AGVs o AMRs?
¿Son fiables las máquinas manuales convertidas en AGV para trabajo 24/7?
¿Qué tipo de robot móvil es mejor en espacios reducidos?
CONTENIDO DEL ARTÍCULO
Ventajas de un AGV/AMR basado en una máquina manual
Mayor calidad de fabricación
Las máquinas manuales se fabrican en volúmenes muy altos comparados con los AGVs o AMRs.
Esto implica:
-
procesos industriales más estables
-
componentes más probados
-
menos problemas típicos de primeras versiones
Aunque la calidad en robótica móvil ha mejorado mucho, las máquinas manuales suelen partir de un nivel de madurez mayor.
Modo manual intuitivo
Los robots basados en máquinas manuales permiten conducir el vehículo en modo manual de forma natural, igual que la máquina original.
En cambio, los robots diseñados desde cero suelen incluir un modo manual menos ergonómico, más limitado o que requiere formación adicional.
Si el modo manual es frecuente o crítico, esta opción suele ser más conveniente.
Desventajas de un AGV/AMR basado en una máquina manual
Fatiga por operación continua
Este es un punto clave y muchas veces ignorado.
Las máquinas manuales no están diseñadas para trabajar 24/7 de manera autónoma.
Sin embargo, muchos AGVs/AMRs operan:
-
durante varias horas seguidas
-
en varios turnos
-
o durante semanas sin parar
Esto genera una fatiga mecánica y eléctrica que el diseño original no contempla, provocando:
-
desgaste prematuro
-
más incidencias
-
mayor necesidad de mantenimiento
Los AGVs/AMRs diseñados desde cero están preparados específicamente para ciclos de trabajo continuos.
Mayor tamaño y menor agilidad
Una máquina manual debe dejar espacio para el operario.
Al convertirla en robot:
-
es más grande
-
tiene un radio de giro mayor
-
pierde agilidad
-
puede tener problemas en pasillos estrechos o zonas congestionadas
En plantas con limitaciones de espacio, esto puede ser decisivo.
Preguntas clave para tomar la decisión
Para elegir de forma objetiva entre ambas opciones, hay que responder dos preguntas fundamentales:
1. ¿Hay espacio suficiente para un vehículo basado en máquina manual?
Si la respuesta es no, la decisión es clara:
Elegir un AGV/AMR diseñado desde cero.
Son más compactos y maniobran mejor en espacios reducidos.
2. ¿Necesito realmente un modo manual?
Si la respuesta es sí, un robot basado en máquina manual suele ser la mejor alternativa.
El modo manual puede ser necesario por dos motivos:
A) Parte de la operación requiere conducción manual
En proyectos complejos, ocurre frecuentemente que una parte del recorrido puede automatizarse y otra no.
Ejemplo habitual:
-
50% del recorrido → automático
-
50% → manual
En estos casos, es imprescindible usar una máquina manual convertida en AGV/AMR.
B) Modo manual como respaldo
El modo manual no solo sirve cuando algo falla.
También es útil cuando:
-
la operación no puede detenerse bajo ningún concepto
-
el coste de que el sistema autónomo caiga es muy alto
-
se requiere redundancia operacional
Aquí la compañía debe decidir entre:
-
tener el propio AGV disponible en modo manual, o
-
mantener vehículos manuales adicionales para emergencias
La decisión depende del coste y la estrategia de flota.
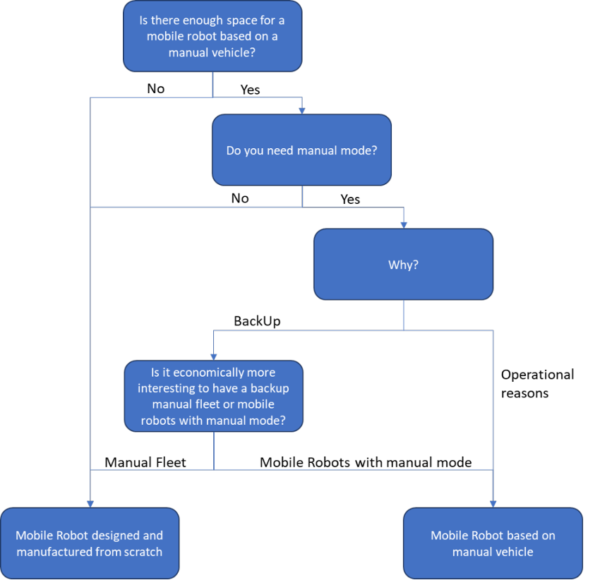
Árbol de decisión
Esto puede ayudaros a decidir cuál es vuestra mejor opción:

Conclusión
La elección entre un AGV/AMR basado en máquina manual y uno diseñado desde cero depende principalmente de:
-
el espacio disponible
-
la necesidad de modo manual
-
el ciclo de trabajo (continuo o intermitente)
-
la fiabilidad esperada
Ambas opciones pueden funcionar muy bien si se aplican en el contexto adecuado.
El objetivo es alinear la tecnología con las necesidades reales de la planta y no al revés.



